 This first prototype was remote controlled by a normal four ways remote controler.
This first prototype was remote controlled by a normal four ways remote controler.
 Each stick controls three legs in triangle.
Each stick controls three legs in triangle.
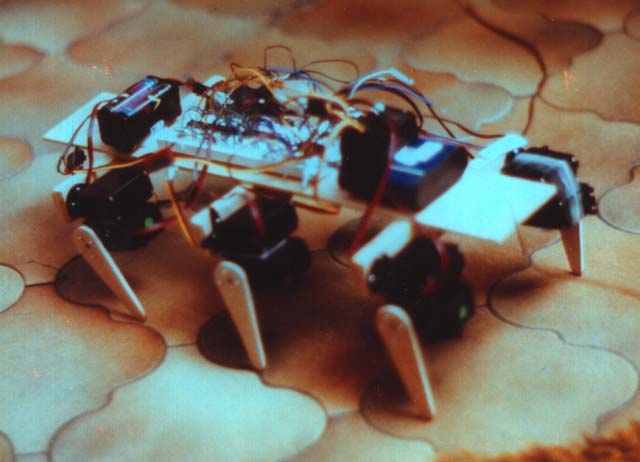
Hexapod Twelve Servo Motors, two per leg. Speed : Well, humm ... about 0 km/s. Not Autonomous. Gait : TripodDesign Year 1992
 ).
).
Practically speaking, it is extremely hard to pilot an insect that way.
It requires a very good coordination we were not able to achieve.
One have to move the two sticks along ellipses unphased 90 degrees.
This problem was supressed with the second version of the insect