Sniky the Mechanical Snake
The Idea
Where did the idea come from ?
Seeing somebody using a weird articulated skate board (a snake board actually) that make it possible
to go forward just by twisting the wheels with no need to unstick the wheels from
the ground as it is necessary in the usual way.
(tic-tac)
So, why couldn't I do it with more joints, and reuse the technology of the insect ?
From a concept ...
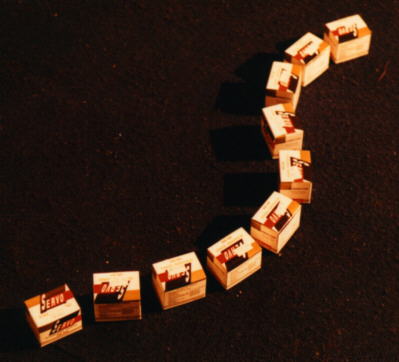


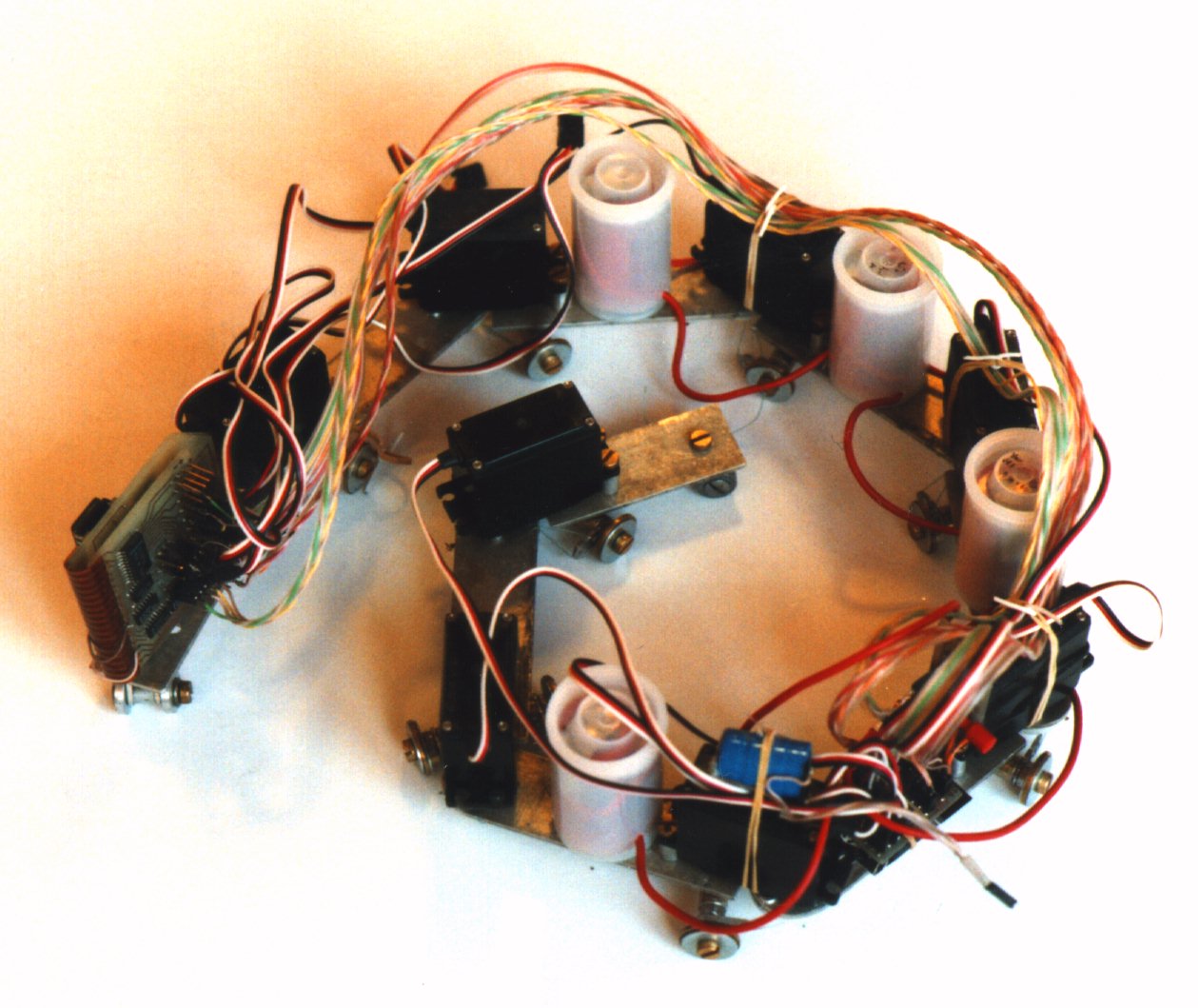
To a machine ...




Technical Characteristics
Sixteen wheels + Two front Wheels + Two tail Wheels Nine Wagons
Eight Servo Controllers, One between each pair of Wagons.
Speed : 13cm/s, 500m/h
Gait : Slide Pushing
Autonomous (wireless)
Autonomy : 1 hour.
Weight : 1270g
Size : 20mm x 65mm x 790mm
Range : Unknown and limited to flat and slippy terrain.
Power consumption : 1500mA at full speed.
Energy : 4 1.2V Nickel Cadmium batteries 1300mAH plus a 9V battery for Digital Parts
Processor : 8 bits microcontroler ST62E15 or ST62E25 (SGS Thomson).
Nine Wagons
Eight Servo Controllers, One between each pair of Wagons.
Speed : 13cm/s, 500m/h
Gait : Slide Pushing
Autonomous (wireless)
Autonomy : 1 hour.
Weight : 1270g
Size : 20mm x 65mm x 790mm
Range : Unknown and limited to flat and slippy terrain.
Power consumption : 1500mA at full speed.
Energy : 4 1.2V Nickel Cadmium batteries 1300mAH plus a 9V battery for Digital Parts
Processor : 8 bits microcontroler ST62E15 or ST62E25 (SGS Thomson). EPROM 2Kbytes.
RAM : 64 bytes ! + 1Kbytes for spinal cord memory.
Processing Power : About 6.5 microseconds per instruction.
CPU load : 50%.
Remote controlled, Radio FM receiver, needs only two channels.
One Red Led under software control.
Wheel rotation speed measurement (not fully implemented)
Servos refresh rate : 50hz (this ensures optimum/strong control)
Source Code size : about 50 kilobytes (massive reuse of previous softwares).
Known Illnesses : none.
EPROM 2Kbytes.
RAM : 64 bytes ! + 1Kbytes for spinal cord memory.
Processing Power : About 6.5 microseconds per instruction.
CPU load : 50%.
Remote controlled, Radio FM receiver, needs only two channels.
One Red Led under software control.
Wheel rotation speed measurement (not fully implemented)
Servos refresh rate : 50hz (this ensures optimum/strong control)
Source Code size : about 50 kilobytes (massive reuse of previous softwares).
Known Illnesses : none.
Design 1994-1995
Electronics & Mechanics Design :  .
.
Mechanics Parts making : Roger CROCHIN.
Decoration : Desperately seeking a skin.
Pilot It ?
Can't be easier.
Need only one stick of the remote controler.
The horizontal axis of the stick controls in real time the direction on the head of the snake.
The vertical axis controls the rate of spread of the copy of the position of the head toward the tail of the snake.
Forward move is obtained by moving continuously the stick from left to right.
A biological way to say it would be that the vertical axis pilots the speed of the spread of the nervous impulses along the spinal cord of the snake. It is not very far from the way a snake works.
How does the software work ?
It is simpler than one may think at first.
A circular buffer stores the direction of the head (first servo).
The head's direction (one byte) is written in the buffer at a position that progresses at a speed proportional to the position of the vertical orientation of the stick.
Seven pointers at regular intervals are there to read the position that has to be followed by each servo.
The interval size is 90 bytes - one millimeter per byte.
It ensures a smooth direction change for standard speeds.
Thus each servo copies the direction of the head after a delay proportional to
- The distance to the head.
- 1 / The vertical axis stick position.
Couldn't be simpler.
The resulting behaviour is really... bionic.
A video of Sniky, along with some famous robots can be purchased through AAAI98
Do not miss the videos of sniky that you can download here
Back to the Mobile Robots page
Reach the top