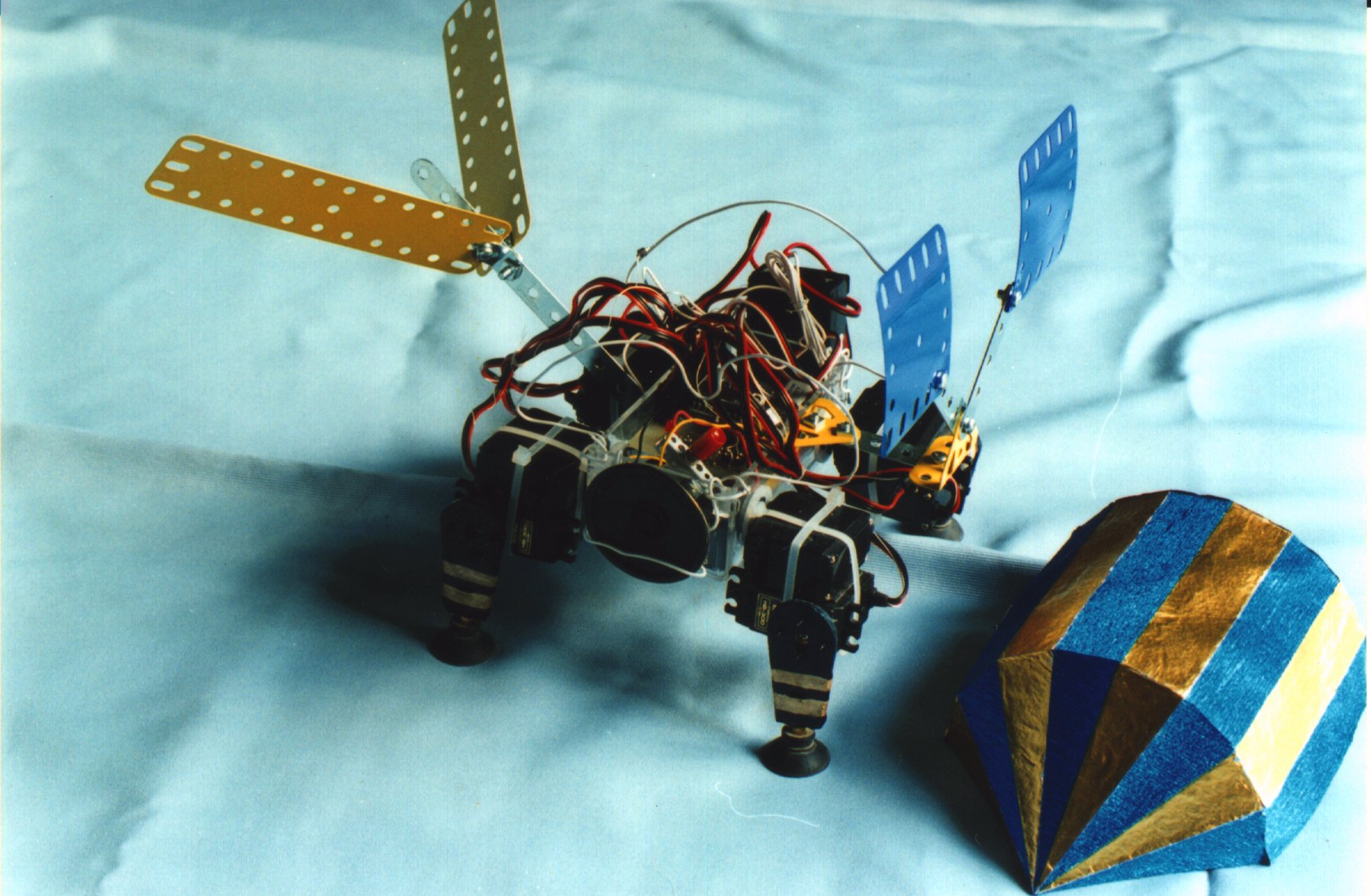

Four legs Eight Servo Controlers, Two per leg. Speed : 500 meters per hour (slighly quicker than a ant, and trust me, it runs fast) AutonomousAutonomy : 1 hour. Weight : 900g Size : 170mm x 170mm x 130mm (height) Range : 250 meters. Power consumption : 1500mA at full speed. Energy : 4 1.2V Nickel Cadmium batteries 1300mAH plus a 9V battery for Digital Parts Processor : 8 bits microcontroler ST62E25 (thomson). EPROM 4Kbytes. Source Code size about 64 kilobytes. RAM : 64 bytes ! Processing Power : About 6.5 microseconds per instruction. CPU load : 80%. Remote controlled, Radio FM receiver, needs only two channels. Eight degrees of freedom. Digital output - current amplified and sent by an analog multiplexor to Loud Speaker / Leds / Infra red Leds. Microphone / Infra red Led receivers connected to an analog multiplexor connected to an ADC input after amplification and filtering One Red Led under software control. Servos refresh rate : 50hz (this ensures optimum control) Known Illnesses : Parkinson.
The ST microcontroller just fitted the need, but its limits were reached.
It was necessary to use tricks to get round the little stack size.
Design 1993-1994
Mechanical design & Mechanical Making : Valentin LEFEVRE
First Efficient Walk Sequence Found : Isabelle (girlfriend of Valentin)
Decoration, Electronics & Software : Laurent Chabin. (email :  ).
).
 Don't even think about making that PCB. It's a mess.
Don't even think about making that PCB. It's a mess.
+-------+ +-------+
4 ¦+------++ ++------+¦ 2
¦¦ ¦¦ ¦¦ ¦¦
¦ ++------+¦ 3 1 ¦+------++ ¦
¦ +-------+ +-------+ ¦
¦ +-------------------------+ ¦ +---------+
¦ ¦ Back ¦ ¦ ¦ Over ¦
¦ ¦ ¦ ¦ +---------+
¦ ¦ ¦ ¦ +---------+
¦ ¦ Front ¦ ¦ ¦ Below ¦
¦ +-------------------------+ ¦ +---------+
¦ +-------+ +-------+ ¦
¦ ++------+¦ 5 7 ¦+------++ ¦
\¦/ ¦¦ ¦¦ ¦¦ ¦¦ \¦/
6 ¦+------++ ++------+¦ 8
+-------+ +-------+

One may say that with only two positions, the insectoďd will just jerk without progression.
The trick is HYSTERESIS.
Each leg is composed of two servo motors, giving two axes of freedom.
Thus two axes do not reach their final position at the same time.
And the resulting sequence of positions looks something like this :
To have a very precise control of speed, the microprocessor generates the intermediate positions.
Every 20ms (50Hz), the software will/won't increase/decrease one step the servos positions in direction of the destination position.
Then call the procedure in charge of driving the servos.
Exact algorithm = line draw in a plane.
Horizontal axis = Time, Vertical Axis = Servo Position, Rate = Stick Vertical Axis Position.
The electronic provided some sensors.
Direct position Feedback from four servo controllers (a wire soldered on the portentiometer of the servo)
Infra red emission and reception in 3 directions for obstacle avoidance.
None of these last features were exploited by the software.
